Sản phẩm đã cho vào giỏ hàng













Lý Tất Thành
09/ 12/ 2016

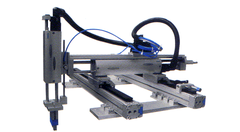
Trong những hệ thống cơ khí - thủy lực lớn có dạng phẳng như: bàn nâng, bửng nâng, sàn nâng. Thì việc giữ cho mặt phẳng ở trạng thái cần bằng là vô cùng quan trọng. Để giữ cho mặt phẳng cân bằng, không bị nghiêng đổ, thì ta sử dụng 2 phương pháp: kết cấu cơ khí tự cân bằng và đồng tốc 2 xy lanh.

Ở những hệ thống cơ khí phải chịu những tải trọng lớn và 2 xy lanh ở khoảng cách xa nhau. Thì thiết kế một kết cấu cơ khí tự cân bằng là rất tốn kém và phức tạp. Việc giữ cân bằng sử dụng hệ thống thủy lực thông qua phương pháp đồng tốc thủy lực, có giá thành rẻ hơn và đơn giản hơn nhiều.
Nguyên tắc của phương pháp đồng tốc 2 xy lanh
Để một bàn nâng có thể cân bằng được, thì 2 xy lanh chịu trách nhiệm nâng mặt phẳng đó phải dịch chuyển cùng 1 tốc độ. Tức lưu lượng dầu vào xy lanh phải bằng nhau, cho dù áp suất của vật tải lên từng xy lanh có khác nhau.
Vài cách phổ biến để đồng tốc 2 xy lanh:
- Sử dụng con van phân phối dạng con trượt.
- Sử dụng van điện.
- Sử dụng bộ chia lưu lượng bánh răng.
- Sử dụng van servo
- Sử dụng 2 bơm thủy lực
Yếu tố quan trọng nhất khi thiết kế hệ thống đồng tốc thủy lực là sự sai số. Tức là tốc độ thò/thụt của 2 xy lanh không được bằng nhau như mong muốn. Khi sai số sảy ra qua lớn sẽ dẫn tới nghiêng bàn nâng, ảnh hướng tới việc vận chuyển, và an toàn cho người đứng trên bàn nâng. Về lâu dài việc xuất hiện sai số có thể ảnh hưởng xấu tới hệ thống cơ khí - thủy lực.
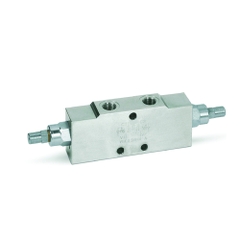
Đống tốc dùng bộ chỉnh lưu con trượt
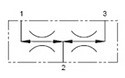
Kí hiệu bộ chia lưu lượng
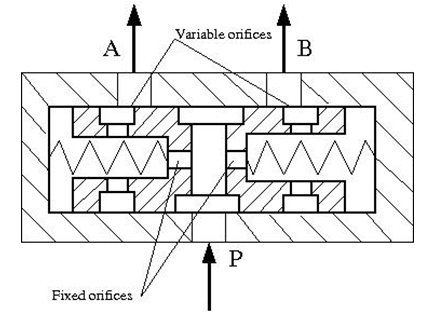
Sơ đồ bộ chia lưu lượng dạng con trượt
Nguyên lý hoạt động
Khi 2 xy lanh không chịu tải hoặc có tải giống nhau, thì áp suất ở buồng A (P1) và Áp suất ở buồng B (P2) là bằng nhau, suy ra lưu lượng qua cửa A (Q1) và cửa B (Q2) bằng nhau Q1=Q2. 2 xy lanh đồng tốc.
Khi 2 xy lanh chịu 2 vật tải khác nhau F1, F2 tương ứng với xy lanh buồng A và buồng B trong đó F1>F2, dẫn tới áp suất 2 buồng khác nhau P1>P2.
- Nếu không dùng bộ chia lưu lượng thì buồng có áp lực lớn hơn sẽ đẩy dầu về buồng có áp lực nhỏ hơn (P1>P2), vì thế lưu lượng của buồng có áp lực nhỏ sẽ nhiều hơn buồng có áp lực cao (Q1<Q2) dẫn đến 2 xy không đồng tốc.
- Bộ chia lưu lượng đảm bảo lưu lượng Q1 = Q2, dù áp suất chênh lệch thế nào. Để làm được việc này, thì khi xảy ra chênh lệch áp suất P1>P2. Con trượt phải di chuyển từ A sang B, để che bớt nắp dầu B và mở rộng nắp dầu A, Qua đó đảm bảo lưu lượng dầu qua ống A và ống B là bằng nhau (Q1=Q2). Con trượt di chuyển được là nhờ khi xảy ra chênh lệch áp ngoài đẩy dầu, áp suất còn đẩy luôn con trượt di chuyển. Vì thế luôn đảm bảo được lưu lượng của 2 đầu ra
Ưu điểm
- Rẻ
- Nhỏ gọn.
- Dễ lắp ráp
Nhược điểm
- Sai số rất lớn
- Dễ xảy ra sai số tốc độ đáp ứng chậm.
- Dầu càng bẩn sai số càng tăng.
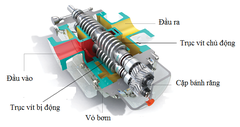
Đồng tốc dùng bộ chia bành răng
Cấu tạo
Bộ chia bánh răng gồm nhiều bánh răng được nối đồng trục với nhau đặt chung một vỏ. Có chung một đường dẫn dầu vào và có nhiều đường dầu ra tương ứng với từng bánh răng.
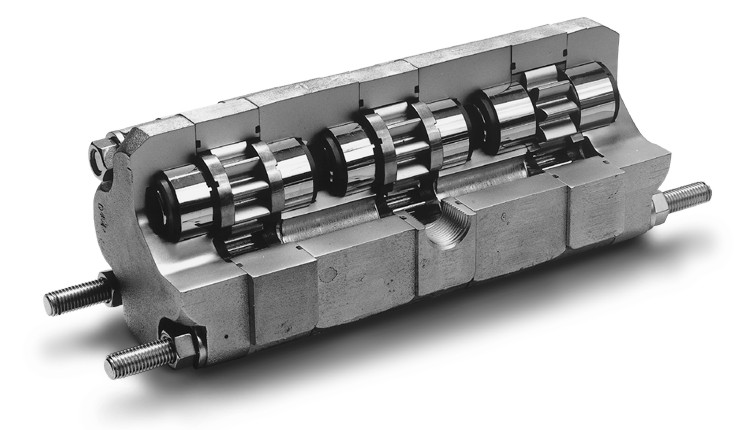
Nguyên lý hoạt động
Vẫn dựa trên một nguyên tắc là lưu lượng 2 đường dầu ra mỗi xy lanh phải bằng nhau.
Do các bánh răng được nối đồng trục với nhau nên khi dầu vào đẩy các bánh răng quay cùng một tốc độ. Vì quay cùng một tốc độ nên lưu lượng ở đầu ra mỗi bánh răng là như nhau không phụ thuộc vào áp suất tải.
Ưu điểm
- Tốn hao ít áp suất
- Đơn giản
- Rẻ tiền
- Không kén dầu
- Dễ bố trí
- Dễ tùy biến, có thể lắp thêm bánh răng
Nhược điểm
- Độ chính xác không cao
- Bị ồn khi hoạt động với tốc độ cao
Đồng tốc sử dụng van Servo
Van servo là van phân phối và van tiết lưu, được điều khiển bằng điện. Van servo có chức năng điều khiển lưu lượng qua van. Van servo được dùng trong các mạch điều khiển tự động.
Cấu tạo
Bộ phận điều khiển con trượt của van servo, như hình dười:
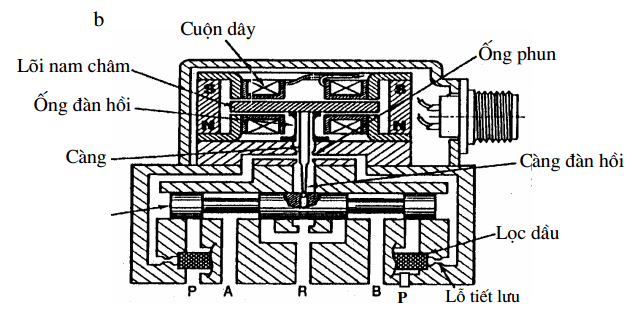
- Nam châm vĩnh cửu
- Hai cuộn dây, nam châm điện
- Cánh chặn và càng đàn hồi
- Ống đàn hồi
- Miệng phun dầu
Nguyên lý hoạt động
Nhờ cảm biến hành trình gắn trên mỗi xy lanh, mà ta có thể xác định tốc độ thò/thụt của mỗi xy lanh. Qua đó gửi tín hiệu điện về khu xử lý trung tâm. Khu xử lý trung tâm sẽ gửi tín hiệu điện kích hoạt nam châm điện trên van servo điều khiển con trượt đóng mở cổng. Để đảm bảo lưu lượng dầu cấp cho mỗi xy lanh luôn bằng nhau.
Ưu điểm
- Do được điều khiển bằng vi xử lý nền độ chình xác gần như tuyệt đối.
Nhược điểm
- Giá thành cao.
- Bị ảnh hưởng bởi môi trường
Viết bình luận của bạn